Okay this post is going to be pretty media heavy, here’s a video of the overview of the system:
There are 4 main systems at work here, and like the video said I’ll be going over all of them.
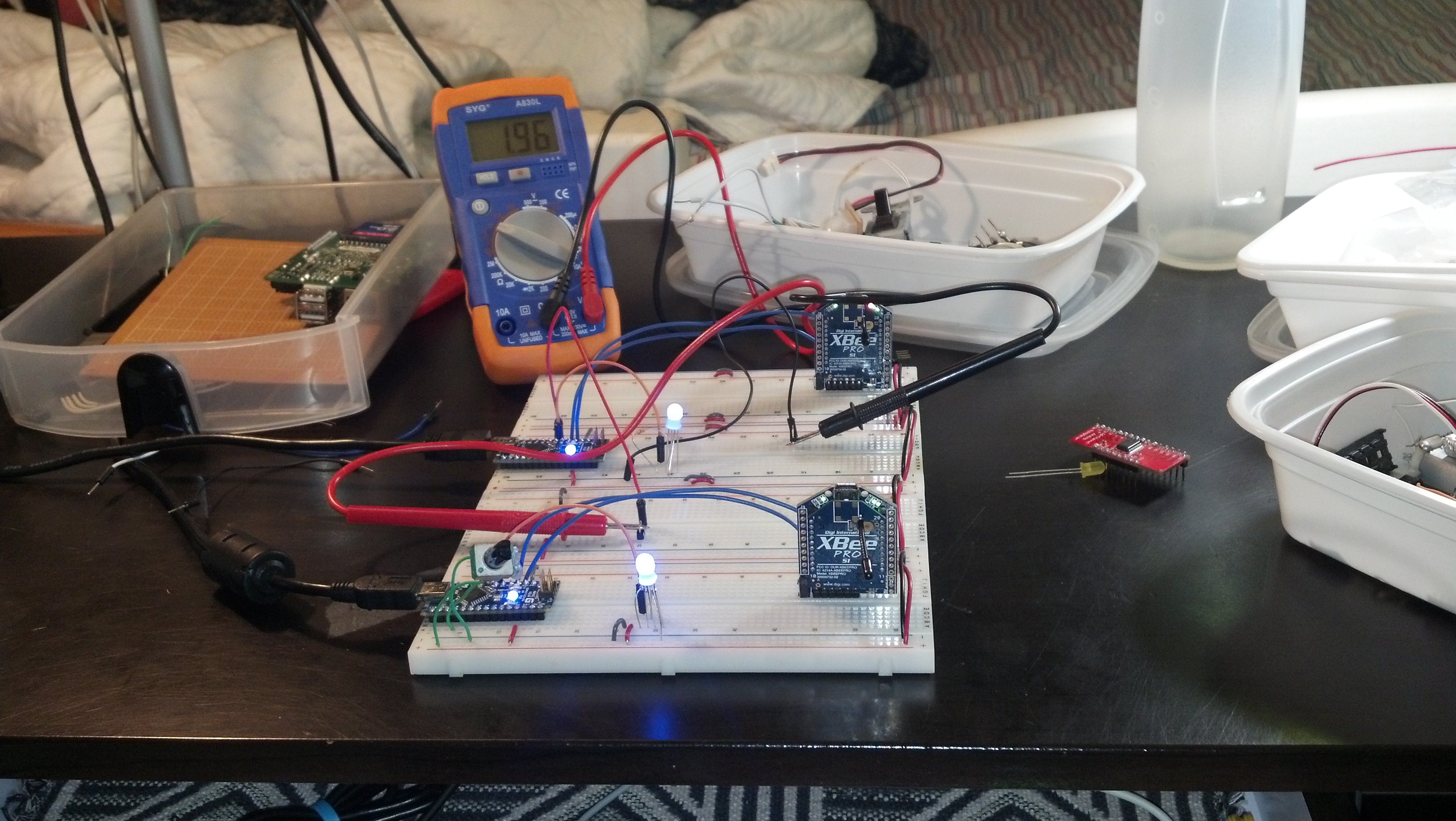
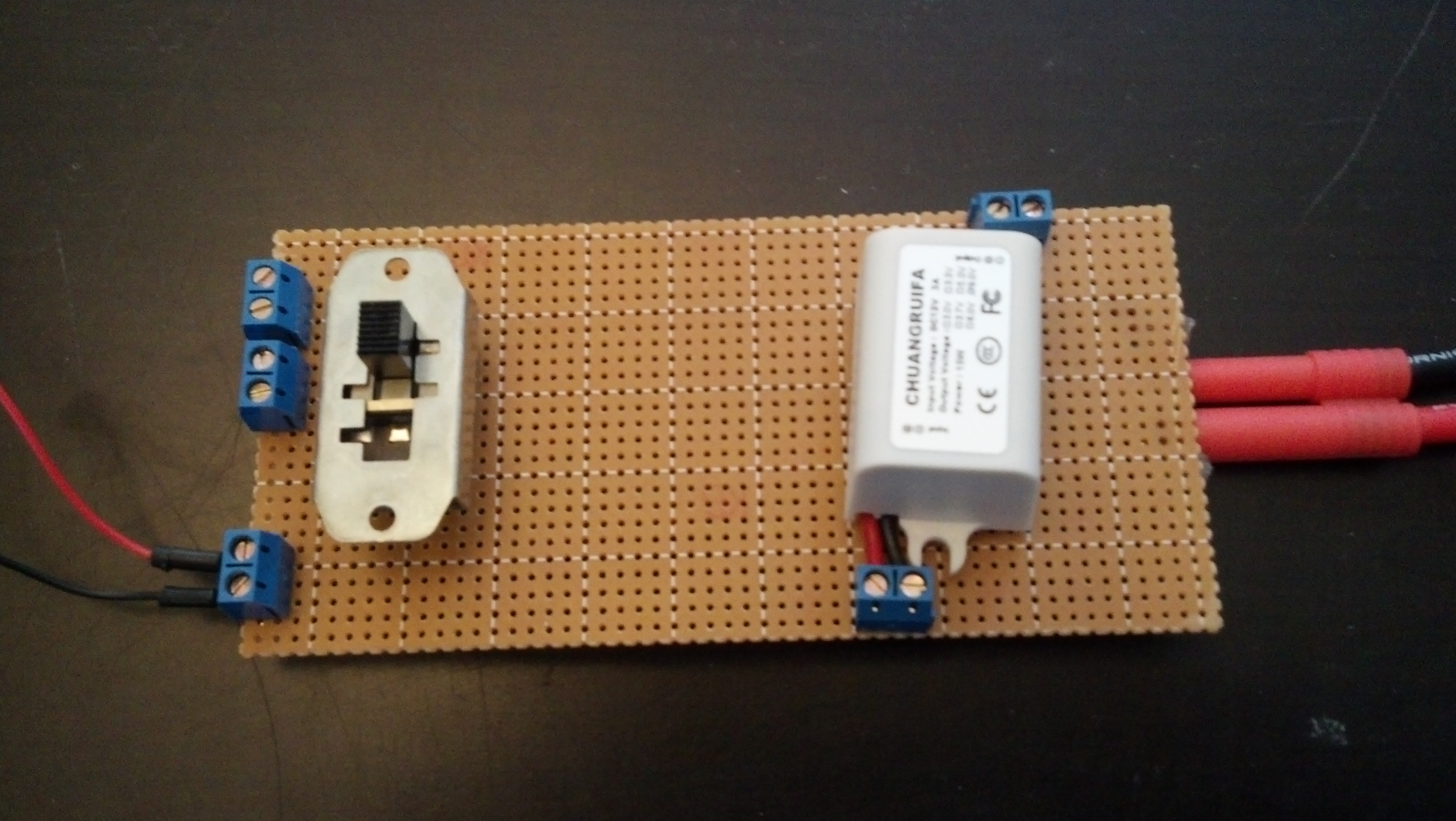
The first is the power system. At it’s core, it’s a Turnigy 5000mAh 3S 20C Lipo Battery Pack that is fed through two voltage converters. The first is 12v-9v@3A and the second is 12v-5v@3A. They are connected all via screw terminals in case they blow out. This all is fed through a large switch before it is fed into the controller and the motor driver, so it can all be cut off at a moments notice.
Here’s a video of me explaining that:
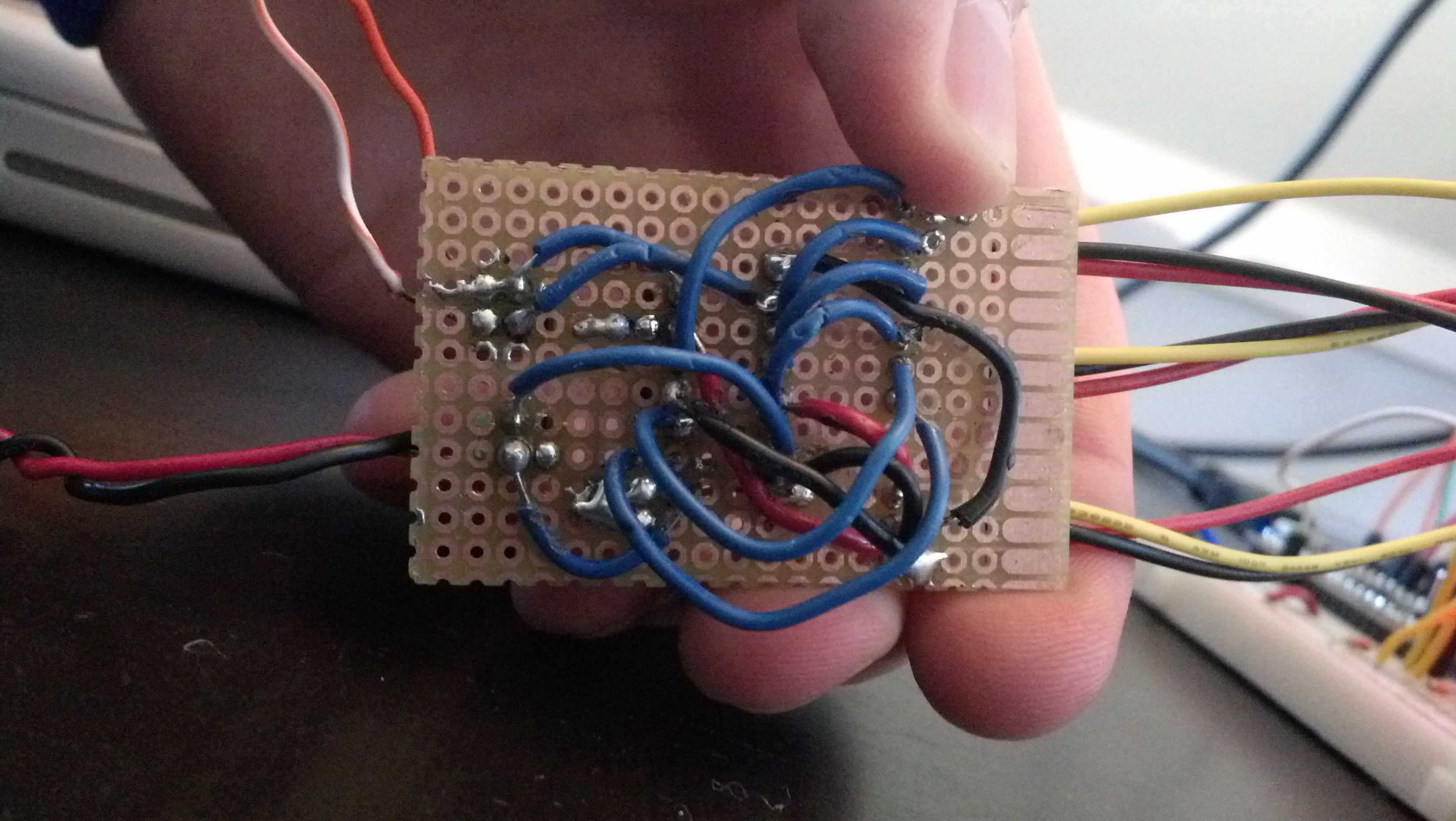
And here are some more detailed pictures:
This is the bottom, I’m still not great at going from breadboard to perfboard so bear with me.

And here’s the top without the 5v module installed, but it would be exactly the same as the 9v one that is:
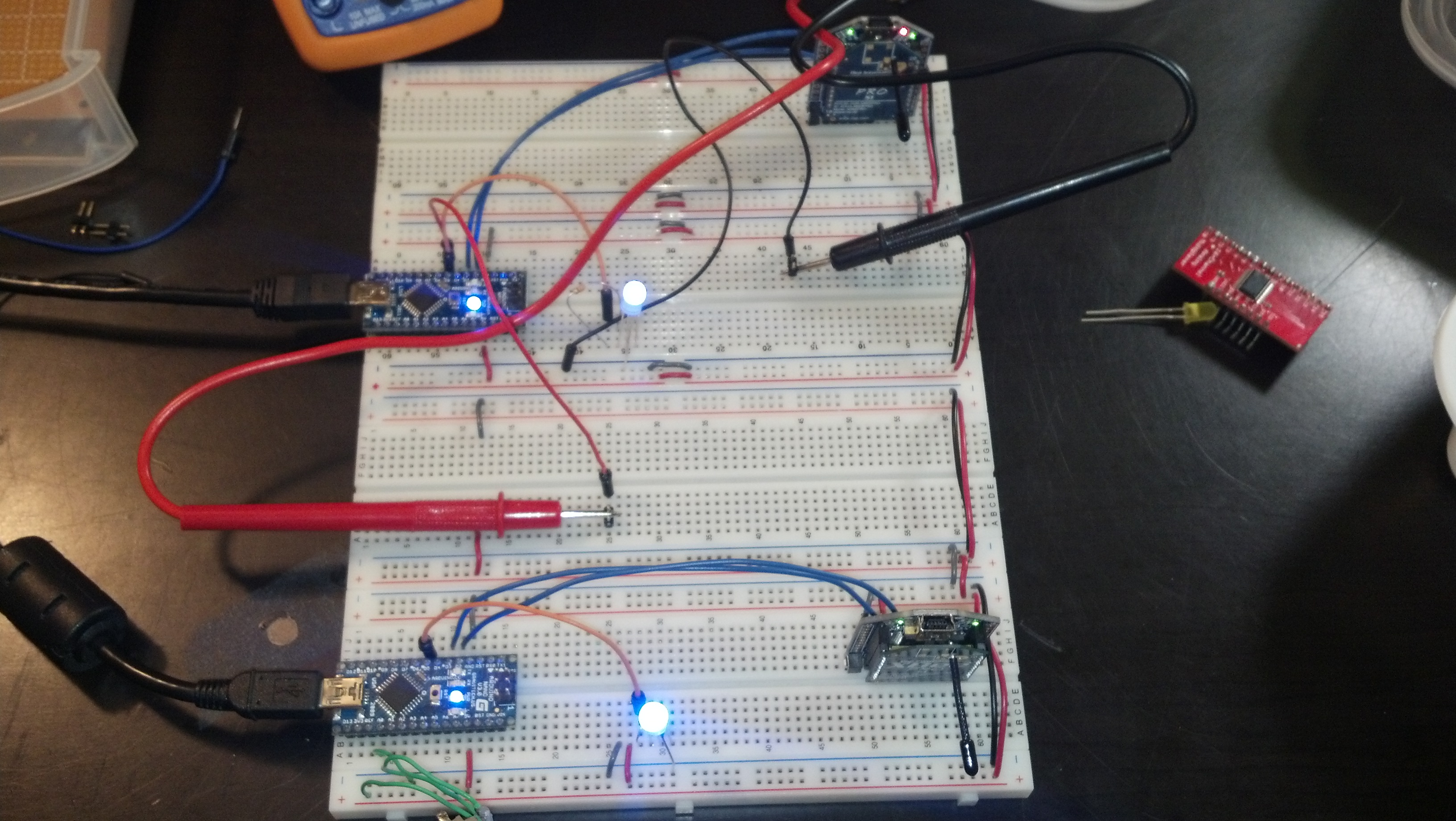
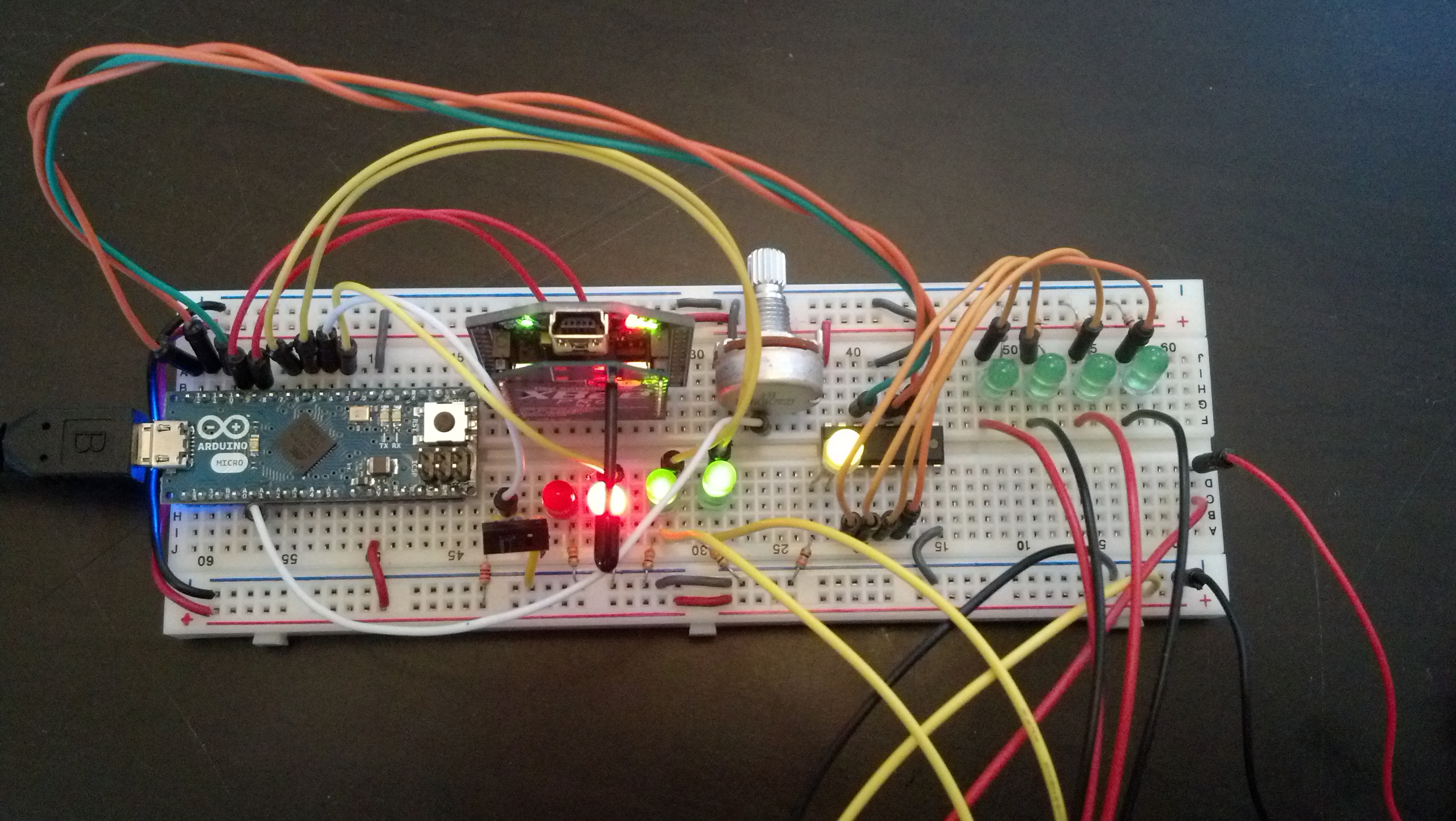
From there we go to the controller. It’s an Arduino Micro connected to a UartSBee V4 with a XBee Pro 60mW Wire Antenna – Series 1 (802.15.4) installed (the same goes for the controller). It also has a 74HC595 to free up pins which drive LED’s and the motor driver:
Here are some pictures:
Here’s the code:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 |
//Serial Handshake declaration #include <string.h> // we'll need this for subString #define MAX_STRING_LEN 20 // like 3 lines above, change as needed. const char EOPmarker = '.'; //This is the end of packet marker char serialbuf[32]; //This gives the incoming serial some room. Change it if you want a longer incoming. //SoftwareSerial declaration #include <SoftwareSerial.h> SoftwareSerial xbee_serial(8, 9); //Shift Register Pins declaration int SER_Pin = 10; //pin 14 on the 75HC595 int RCLK_Pin = 11; //pin 12 on the 75HC595 int SRCLK_Pin = 12; //pin 11 on the 75HC595 #define number_of_74hc595s 1 //How many of the shift registers - change this #define numOfRegisterPins number_of_74hc595s * 8 //do not touch boolean registers[numOfRegisterPins]; //Servo declarations #include <Servo.h> Servo left_servo; Servo rght_servo; //Misc Pin declaration //inputs int pot = 1; int debug_switch1 = 4; //outputs int fade_LED = 3; int x_LED = 5; int y_LED = 6; //int debug_switch1_LED = 12; //Misc Integer declarations int brightness = 0; // how bright the LED is int fadeAmount = 20; // how many points to fade the LED by int x_upperTrigger = 600; int x_lowerTrigger = 400; int y_upperTrigger = 600; int y_lowerTrigger = 400; void setup(){ Serial.begin(9600); xbee_serial.begin(9600); pinMode(SER_Pin, OUTPUT); pinMode(RCLK_Pin, OUTPUT); pinMode(SRCLK_Pin, OUTPUT); pinMode(0, INPUT); clearRegisters(); writeRegisters(); pinMode(pot, INPUT); pinMode(debug_switch1, INPUT); pinMode(x_LED, OUTPUT); pinMode(y_LED, OUTPUT); pinMode(fade_LED, OUTPUT); xbee_serial.print("0,0,0."); // this is very important as it starts of the loop because it makes "xbee_serial.avalible() > 0. } void loop(){ if (xbee_serial.available() > 0) { static int bufpos = 0; char inchar = xbee_serial.read(); if (inchar != EOPmarker) { serialbuf[bufpos] = inchar; bufpos++; } else { serialbuf[bufpos] = 0; //restart the buff bufpos = 0; //restart the position of the buff handshake(); debug_handshake(); setRegisterPin(1, HIGH); writeRegisters(); } } } void handshake(){ //input, recived from controller // led1val,ledval2,fade_LEDvalue. //analogWrite(x_LED, map(atoi(subStr(serialbuf, "," , 1)),0,1023,0,255)); //analogWrite(y_LED, map(atoi(subStr(serialbuf, "," , 2)),0,1023,0,255)); analogWrite(fade_LED, atoi(subStr(serialbuf, "," , 3))); brightness = brightness + fadeAmount; // reverse the direction of the fading at the ends of the fade: if (brightness == 0 || brightness == 255) { fadeAmount = -fadeAmount ; } if (atoi(subStr(serialbuf, "," , 1)) > x_upperTrigger ){ analogWrite(x_LED, map(atoi(subStr(serialbuf, "," , 1)),512,1023,0,255)); setRegisterPin(2, HIGH); setRegisterPin(3, LOW); writeRegisters(); } if (atoi(subStr(serialbuf, "," , 1)) < x_lowerTrigger ){ analogWrite(x_LED, map(atoi(subStr(serialbuf, "," , 1)),512,0,0,255)); setRegisterPin(2, LOW); setRegisterPin(3, HIGH); writeRegisters(); } if (atoi(subStr(serialbuf, "," , 1)) > x_lowerTrigger && atoi(subStr(serialbuf, "," , 1)) < x_upperTrigger){ setRegisterPin(2, LOW); setRegisterPin(3, LOW); writeRegisters(); } if (atoi(subStr(serialbuf, "," , 2)) > y_upperTrigger ){ analogWrite(y_LED, map(atoi(subStr(serialbuf, "," , 2)),512,1023,0,255)); setRegisterPin(4, HIGH); setRegisterPin(5, LOW); writeRegisters(); } if (atoi(subStr(serialbuf, "," , 2)) < y_lowerTrigger ){ analogWrite(y_LED, map(atoi(subStr(serialbuf, "," , 2)),512,0,0,255)); setRegisterPin(4, LOW); setRegisterPin(5, HIGH); writeRegisters(); } if (atoi(subStr(serialbuf, "," , 2)) > y_lowerTrigger && atoi(subStr(serialbuf, "," , 2)) < y_upperTrigger){ setRegisterPin(4, LOW); setRegisterPin(5, LOW); writeRegisters(); } //output, sent to controller //ledpot1,fade_LEDval. xbee_serial.print(analogRead(pot)); xbee_serial.print(","); xbee_serial.print(brightness); //This second byte is for the purpose of the program, it is not being used. xbee_serial.print("."); //EOP marker delay(10); } void debug_handshake(){ //input, recived from controller Serial.print("VEHICLE DEBUG: "); Serial.print("INPUTS|"); Serial.print(" x_LED: "); Serial.print(map(atoi(subStr(serialbuf, "," , 1)),0,1023,0,255)); Serial.print(" y_LED: "); Serial.print(map(atoi(subStr(serialbuf, "," , 2)),0,1023,0,255)); Serial.print(" in fade_LED: "); Serial.print(atoi(subStr(serialbuf, "," , 3))); //output, sent to controller Serial.print(" OUTPUTS|"); Serial.print(" Pot 1: "); Serial.print(analogRead(pot)); Serial.print(" out fade_LED: "); Serial.print(brightness); Serial.println(""); } char* subStr (char* input_string, char *separator, int segment_number) { char *act, *sub, *ptr; static char copy[MAX_STRING_LEN]; int i; strcpy(copy, input_string); for (i = 1, act = copy; i <= segment_number; i++, act = NULL) { sub = strtok_r(act, separator, &ptr); if (sub == NULL) break; } return sub; } void clearRegisters(){ for(int i = numOfRegisterPins - 1; i >= 0; i--){ registers[i] = LOW; } } void writeRegisters(){ digitalWrite(RCLK_Pin, LOW); for(int i = numOfRegisterPins - 1; i >= 0; i--){ digitalWrite(SRCLK_Pin, LOW); int val = registers[i]; digitalWrite(SER_Pin, val); digitalWrite(SRCLK_Pin, HIGH); } digitalWrite(RCLK_Pin, HIGH); } //set an individual pin HIGH or LOW void setRegisterPin(int index, int value){ registers[index] = value; } |
Next is the motor driver. It’s built around the L298N. Here’s the video
Here are pictures:

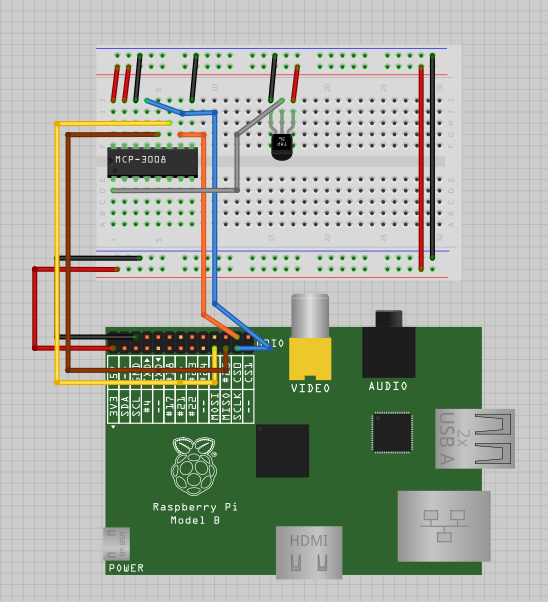
It’s my first real use of a perfboard to make a project more permanent which is why it looks awful, but this is what it should look like:
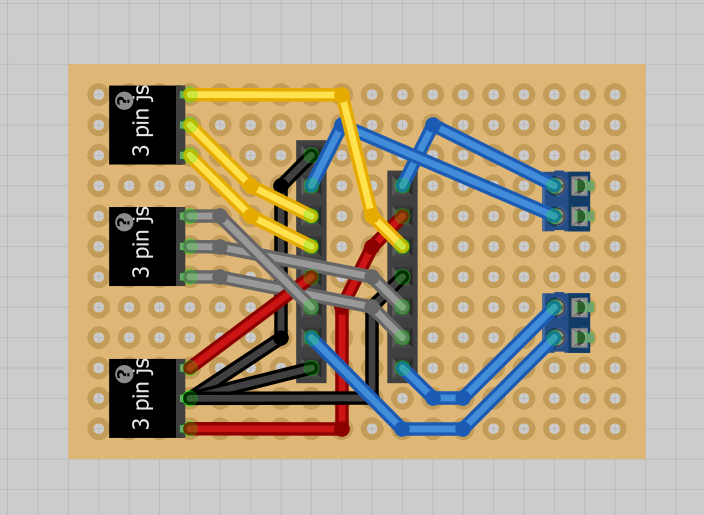
Image generated by fritzing.
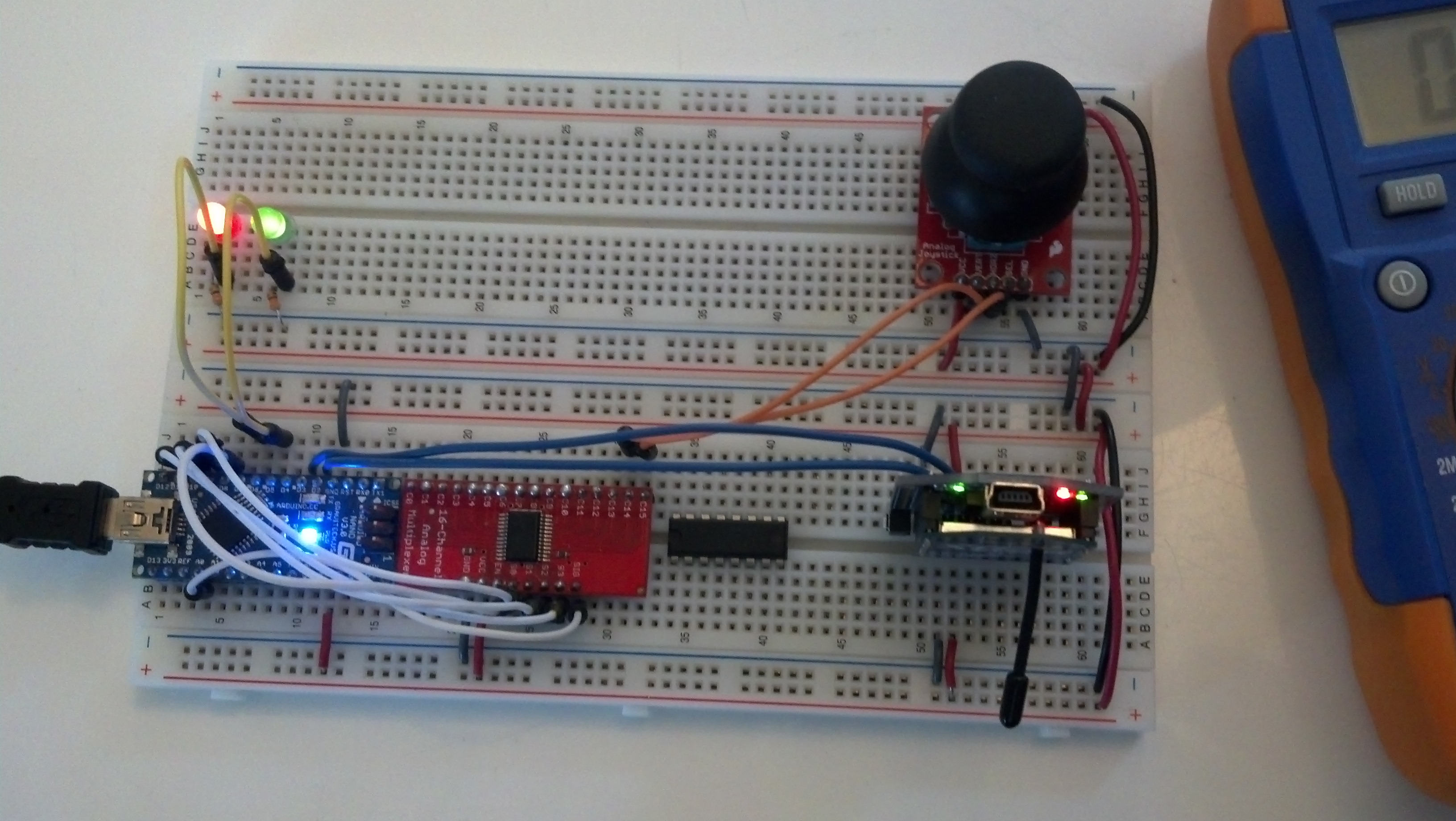
The last system is the controller. It’s an arduino micro hooked up to the same xbee system as seen earlier with a joystick and a multiplexer for more inputs. Here’s a video:
And some pictures:
So basically it receives and sends data to and from the controller as seen in the following code:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 |
//Serial Handshake declaration #include <string.h> // we'll need this for subString #define MAX_STRING_LEN 20 // like 3 lines above, change as needed. const char EOPmarker = '.'; //This is the end of packet marker char serialbuf[32]; //This gives the incoming serial some room. Change it if you want a longer incoming. //SoftwareSerial declaration #include <SoftwareSerial.h> SoftwareSerial xbee_serial(2, 3); //Mux control pins declarations int s0 = 8; int s1 = 9; int s2 = 10; int s3 = 11; int SIG_pin = 0; //Shift Register Pins declaration int SER_Pin = 5; //pin 14 on the 75HC595 int RCLK_Pin = 6; //pin 12 on the 75HC595 int SRCLK_Pin = 7; //pin 11 on the 75HC595 #define number_of_74hc595s 1 //How many of the shift registers - change this #define numOfRegisterPins number_of_74hc595s * 8 //do not touch boolean registers[numOfRegisterPins]; //Servo declarations int left_servo_val; int rght_servo_val; //Misc Pin declaration //inputs int debug_switch1 = 4; //outputs int pot_LED = 5; int fade_LED = 6; int debug_switch1_LED = 2; //Misc Integer Declarations int joystick_x; int joystick_y; int brightness = 0; // how bright the LED is int fadeAmount = 20; // how many points to fade the LED by void setup(){ Serial.begin(9600); xbee_serial.begin(9600); //mux setup pinMode(s0, OUTPUT); pinMode(s1, OUTPUT); pinMode(s2, OUTPUT); pinMode(s3, OUTPUT); digitalWrite(s0, LOW); digitalWrite(s1, LOW); digitalWrite(s2, LOW); digitalWrite(s3, LOW); //shift register setup pinMode(SER_Pin, OUTPUT); pinMode(RCLK_Pin, OUTPUT); pinMode(SRCLK_Pin, OUTPUT); pinMode(0, INPUT); clearRegisters(); writeRegisters(); //Misc Pin Declarations pinMode(pot_LED, OUTPUT); xbee_serial.print("0,0,0."); // this is very important as it starts of the loop because it makes "xbee_serial.avalible() > 0. } void loop(){ if (xbee_serial.available() > 0) { static int bufpos = 0; char inchar = xbee_serial.read(); if (inchar != EOPmarker) { serialbuf[bufpos] = inchar; bufpos++; } else { serialbuf[bufpos] = 0; //restart the buff bufpos = 0; //restart the position of the buff handshake(); } } } void handshake(){ //input, recived from vehicle //led1. analogWrite(pot_LED, map(atoi(subStr(serialbuf, "," , 1)),0,1023,0,255)); analogWrite(fade_LED, atoi(subStr(serialbuf, "," , 2))); brightness = brightness + fadeAmount; // reverse the direction of the fading at the ends of the fade: if (brightness == 0 || brightness == 255) { fadeAmount = -fadeAmount ; } //output, sent to vehicle //joystick1_ledval,joystick2_ledval,fade_LED. analogRemap(); xbee_serial.print(joystick_x); // Value that it sends over the serial xbee_serial.print(","); xbee_serial.print(joystick_y); //This second byte is for the purpose of the program, it is not being used. xbee_serial.print(","); xbee_serial.print(brightness); xbee_serial.print("."); //EOP marker delay(10); } void debug_handshake(){ } void analogRemap(){ joystick_x = readMux(15); joystick_y = readMux(14); } char* subStr (char* input_string, char *separator, int segment_number) { char *act, *sub, *ptr; static char copy[MAX_STRING_LEN]; int i; strcpy(copy, input_string); for (i = 1, act = copy; i <= segment_number; i++, act = NULL) { sub = strtok_r(act, separator, &ptr); if (sub == NULL) break; } return sub; } int readMux(int channel){ int controlPin[] = {s0, s1, s2, s3}; int muxChannel[16][4]={ {0,0,0,0}, //channel 0 {1,0,0,0}, //channel 1 {0,1,0,0}, //channel 2 {1,1,0,0}, //channel 3 {0,0,1,0}, //channel 4 {1,0,1,0}, //channel 5 {0,1,1,0}, //channel 6 {1,1,1,0}, //channel 7 {0,0,0,1}, //channel 8 {1,0,0,1}, //channel 9 {0,1,0,1}, //channel 10 {1,1,0,1}, //channel 11 {0,0,1,1}, //channel 12 {1,0,1,1}, //channel 13 {0,1,1,1}, //channel 14 {1,1,1,1} //channel 15 }; //loop through the 4 sig for(int i = 0; i < 4; i ++){ digitalWrite(controlPin[i], muxChannel[channel][i]); } //read the value at the SIG pin int val = analogRead(SIG_pin); //return the value return val; } void clearRegisters(){ for(int i = numOfRegisterPins - 1; i >= 0; i--){ registers[i] = LOW; } } void writeRegisters(){ digitalWrite(RCLK_Pin, LOW); for(int i = numOfRegisterPins - 1; i >= 0; i--){ digitalWrite(SRCLK_Pin, LOW); int val = registers[i]; digitalWrite(SER_Pin, val); digitalWrite(SRCLK_Pin, HIGH); } digitalWrite(RCLK_Pin, HIGH); } //set an individual pin HIGH or LOW void setRegisterPin(int index, int value){ registers[index] = value; } |
All of the parts listed in this video can be seen here which is the parts list.
That was a huge post! Thanks for reading and leave a comment if you have any questions.